
Multi-robot system
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | A multi-agent system, comprising a server and at least two robots controllably wirelessly connected with the server, where the server contains at least one software agent allocated to each robot, which software agent provides abstraction from the robot being implemented in the hardware and enables to calculate, analyze, optimize and control the implementation of different scenarios of robots operation. The robots with marker sensors, odometers and collision sensors send their location and a (part of a) global map of a to a server with a global map, robots’ positions and marker positions, the server updates the global map, plans work of the robots in optimal way, divides the environment in areas allocated to the robots. |
| Publication number | EP2851760 (A1) |
| Publication date | 2015-03-25 |
| Inventor(s) | A.Ņikitenko (DAISE), E.Lavendelis (DAISE), A.Liekna (DAISE), M.Ekmanis (DAISE), I.Andersone (DAISE), G.Kuļikovskis (RTU), K.Priedniece (DAISE) |
[/fusion_text][/fullwidth]
Cable braking and backward tension device
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | A cable braking and backward tension device (14) for providing a braking and backward pulling force to a cable (4) comprising a stand (2), a spool (3) rotatably attached to the stand (2), the spool (3) being adapted for the cable (4) to be wound on it, a braking disk (5) with a plurality of permanent magnets (7) attached to it, the braking disk (5) being rotatably attached to the stand (2), an actuator (6) coupled to the braking disk (5) and configured to rotate the braking disk (5), wherein the braking disk (5) is located coaxially with a spool (3) and wherein the spool (3) is made of ferromagnetic or paramagnetic material.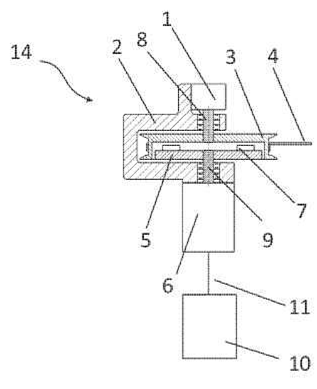 |
| Publication number | EP2813456 (A1) |
| Publication date | 2014-12-17 |
| Inventor(s) | G.Kuļikovskis (RTU), A.Ņikitenko (DAISE), E.Deksnis (RTU), M.Ekmanis (DAISE), A.Liekna (DAISE), I.Andersone (DAISE), K.Priedniece (DAISE) |
[/fusion_text][/fullwidth]
ARCHITECTURE OF INSURANCE INFORMATION SYSTEM ROOTED IN A COMPLEX OF 9 INTELLECTUAL DEVICES
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | Invention relates to an architecture of insurance information system comprising 9 intellectual devices. The devices perform functions of the insurance system by reacting on predetermined 7 signals-events or their combinations. By reacting the devices execute jobs asynchronously. |
| Publication number | LV14565 (A) |
| Publication date | 2012-08-20 |
| Inventor(s) | E.Lavendelis (DAISE), L.Novickis (RTU), M.Uhanova (RTU) |
[/fusion_text][/fullwidth]
ROBOTIZED PLATFORM WITH EIGHT DRIVING WHEELS HAVING LOW LOCATED ROTATION CENTERS OF WHEELS AND CHASSIS SUPPORTS
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | |
| Publication number | LV14406 (B) |
| Publication date | 2012-01-20 |
| Inventor(s) | A.Ņikitenko (DAISE), G.Kulikovskis (RTU), I.Kaktabulis (RTU), I.Andersone (DAISE) |
[/fusion_text][/fullwidth]
ROBOTIZED PLATFORM WITH EIGHT DRIVING WHEELS PROVIDED WITH ADDITIONAL SPRINGS
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | |
| Publication number | LV14407 (B) |
| Publication date | 2012-01-20 |
| Inventor(s) | A.Ņikitenko (DAISE), G.Kulikovskis (RTU), I. Kaktabulis (RTU), I.Andersone (DAISE) |
[/fusion_text][/fullwidth]
TRACKED PLATFORM FOR ROBOTIZED VEHICLE PROVIDED WITH MOBILE TRACK SEGMENT
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | The invention is related to mechanics, in particular to devices, configurations and methods that provides high mobility and wide use of the tracked platforms int. al. development of mobile robots. The goal is to provide a platform with high mobility and ability to move in rough terrain and ensure a good contact with the terrain. The platform includes central chassis, driving wheels with appropriate track tensioners, tracks – one for each side, pulleys, movable front heavers, heaver springs and additional pulleys that maintain good wheel contact with the track and acts as a track vibration reducer. While platform moves, if an obstacle is relatively far and therefore heaver’s arm is large, track adapts to the obstacle configuration providing better contact with the terrain, but when the heaver’s arm is small enough, the heaver spring lifts up the platform thereby allowing to get over the obstacle effectively. This relatively simple construction reduces platform’s dependence on operator’s direct sight contact or complex sensor systems in order to operate autonomously and maintaining good abilities to overcome obstacles. |
| Publication number | LV14016 (B) |
| Publication date | 2010-01-20 |
| Inventor(s) | A.Ņikitenko (DAISE), L.Počs |
[/fusion_text][/fullwidth]
TRACKED PLATFORM WITH EIGHT WHEELS FOR ROBOTIZED VEHICLE
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | The invention is related to mechanics, in particular to devices, configurations and methods that provides high mobility and wide use of the tracked platforms int. al. development of mobile robots. The goal is to provide a platform with high mobility and ability to move in rough terrain and ensure good contact with the ground. The platform includes central chassis, eight driving wheels that in pairs are coupled with tracks, wheel pair joints, and independent chassis joints that allow to move independently of the left and right side wheel sections. The chassis joints maintain the chassis in balance during motion. This allows to overcome obstacles that maintain different loads on left end right side wheel sections without loss of balance or contact with the ground. Tracks provide relatively high road adherence and uses only one motor for each wheel pair thereby simplifying the construction. |
| Publication number | LV14017 (B) |
| Publication date | 2010-01-20 |
| Inventor(s) | A.Ņikitenko (DAISE), L.Počs |
[/fusion_text][/fullwidth]
PLATFORM OF MOBILE ROBOT WITH EIGHT WHEELS
[fullwidth backgroundcolor=”” backgroundimage=”” backgroundrepeat=”no-repeat” backgroundposition=”left top” backgroundattachment=”scroll” bordersize=”0px” bordercolor=”” borderstyle=”” paddingtop=”0px” paddingbottom=”0px” paddingleft=”0px” paddingright=”0px” menu_anchor=”” class=”” id=””][fusion_text]
| Abstract | The invention is related to mechanics, in particular to devices, configurations and methods that provides high mobility and wide use of the wheeled platforms int. al. development of mobile robots. The goal is to provide a platform with high mobility and ability to move in rough terrain and ensure good contact with the ground. The platform includes central chassis, eight driving wheels, wheel pair joints, and independent chassis joints that allow to move independently of the left and right side wheel sections. The chassis joints maintain the chassis in balance during motion. This allows to overcome obstacles that maintain different loads on left end right side wheel sections without loss balance or contact with the ground. |
| Publication number | LV13866 (B) |
| Publication date | 2009-05-20 |
| Inventor(s) | A.Ņikitenko (DAISE) |
[/fusion_text][/fullwidth]